Today we created a rig similar to the one in your documentation:

and set the zoom lens to 16 mm (because the sensor is 36*24 mm).
Then we created succesfully the lens correction profile which we could succesfully use in the calibration step inside of Depthkit, when doing the pairing process.
We have tried the pairing three times. Two times with another rig construction (where the camera lens and the sensor lens were exactly vertically above each other, but quite far away. Then, because the pairing result was always “BAD”, we changed the rig-construction to attached photo.
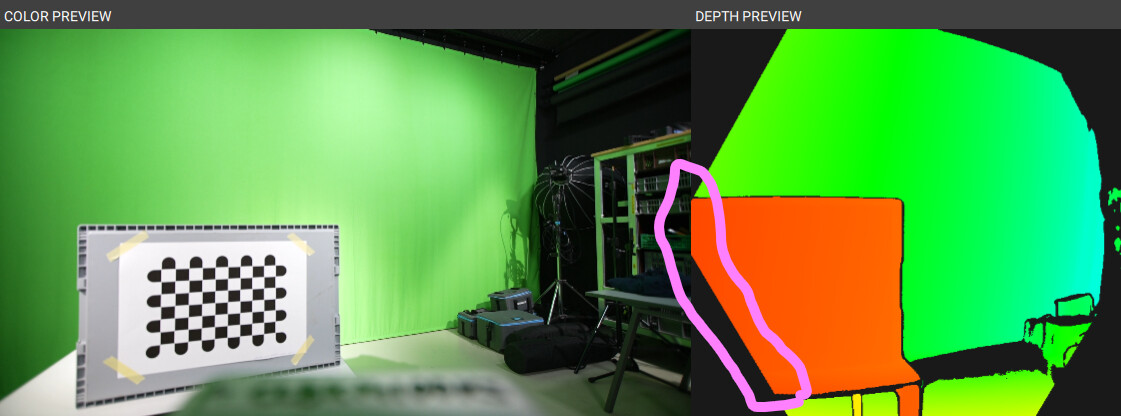
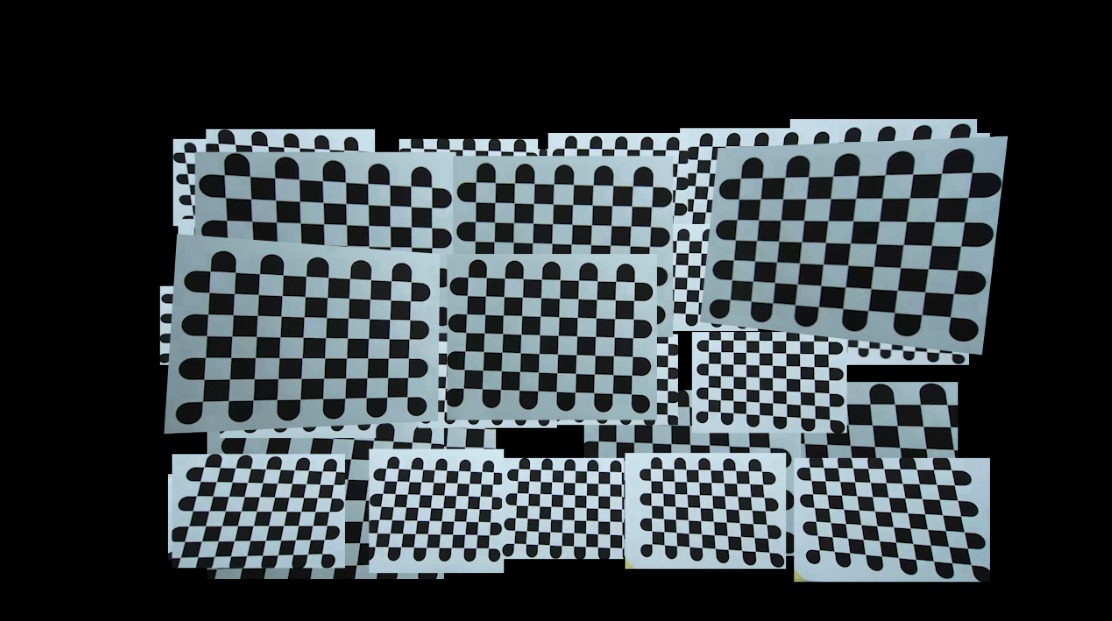
We again started the calibration: always covering all four quadrants of the image, at three different distances from the calibration chart. But still the result says “BAD”.
The calibration chart stood always at the same position and rotation. Untouched. We only moved and rotated the camera rig in space. Maybe we should have kept the camera rig untouched and just move the calibration chart in space, covering both lenses and quadrants?
Also we had a hard time seeing the white alignment indicators, because the contrast and exposure may have been too high. But that worked best for detection the chart.
Have you any more advices than what is already written here?
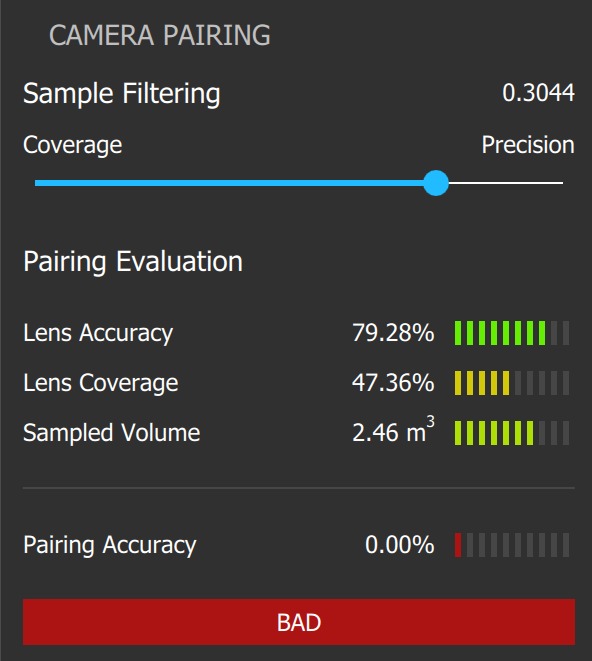
https://docs.depthkit.tv/docs/camera-pairing#how-do-i-read-my-pairing-evaluation
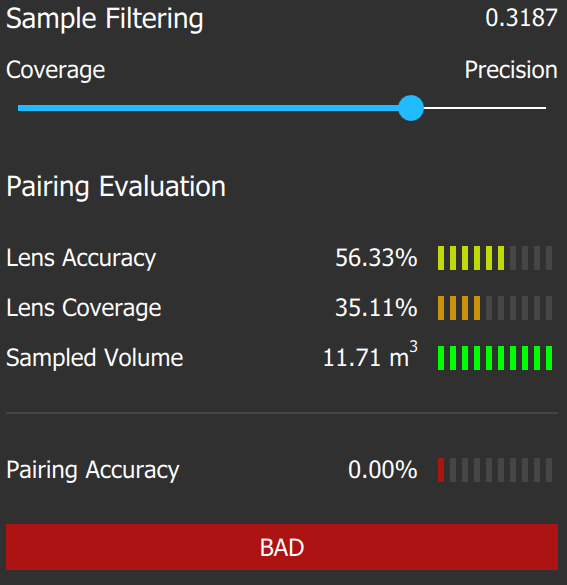
What information can I get from these numbers?
https://files.readme.io/f30f849-samples.PNG
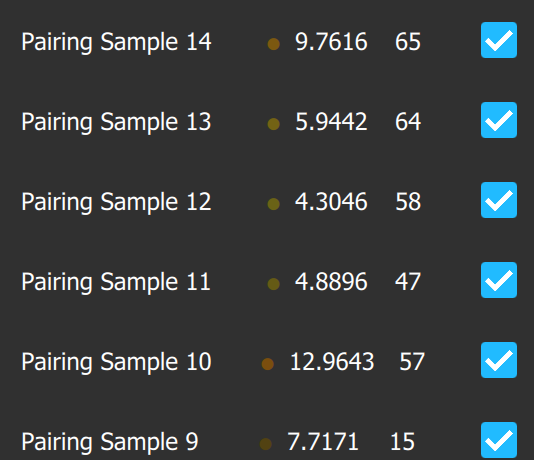
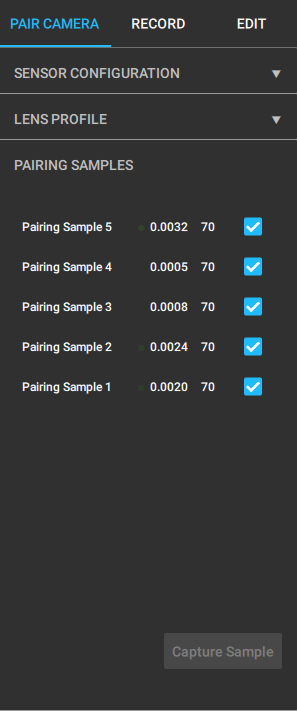{kind=link}