Hey Depthkit-Team!
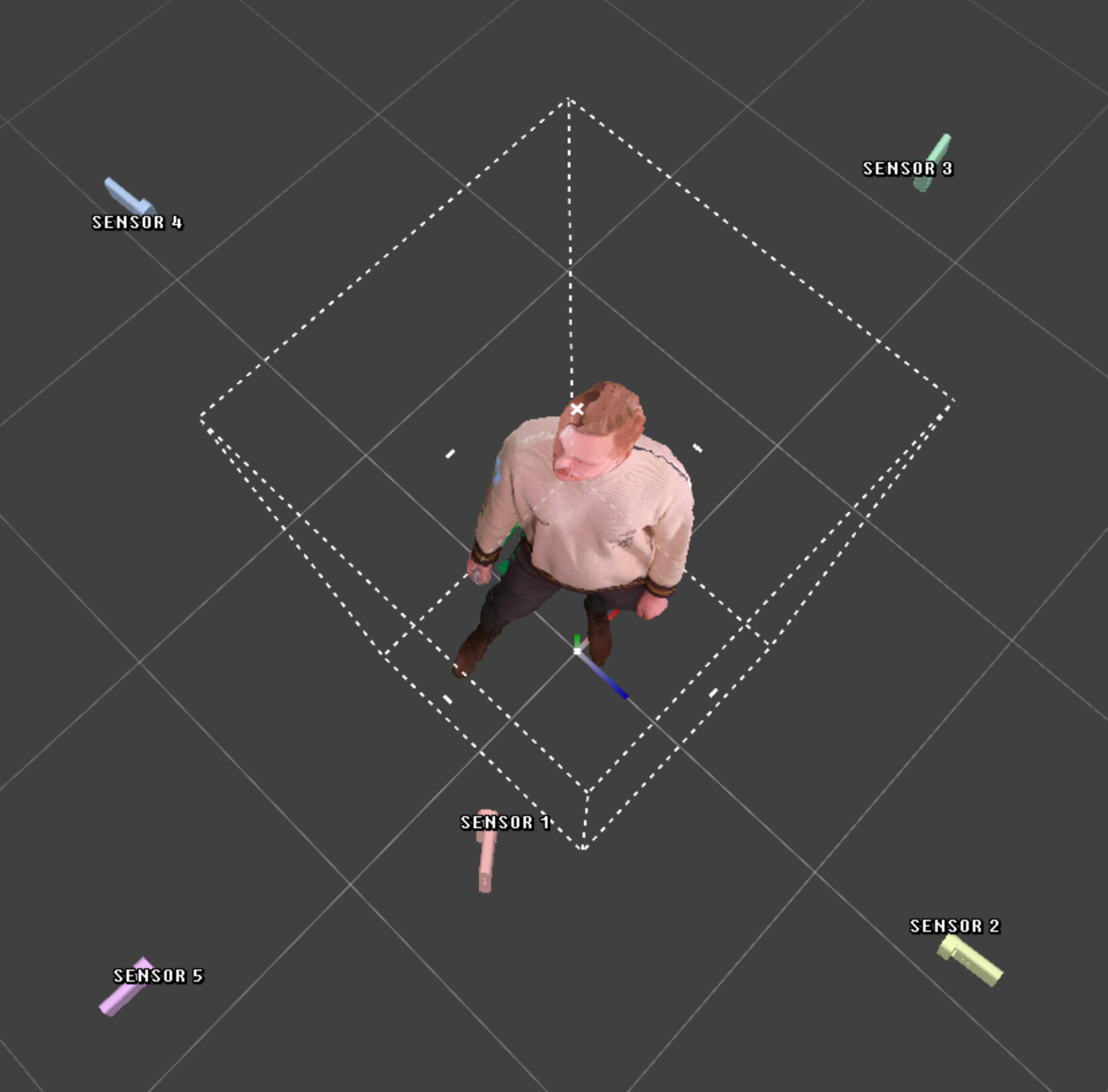
I’m currently trying to improve my capture quality, consisting out of 5 sensors, arranged in the configuration suggested in the Depthkit Studio Tutorials.
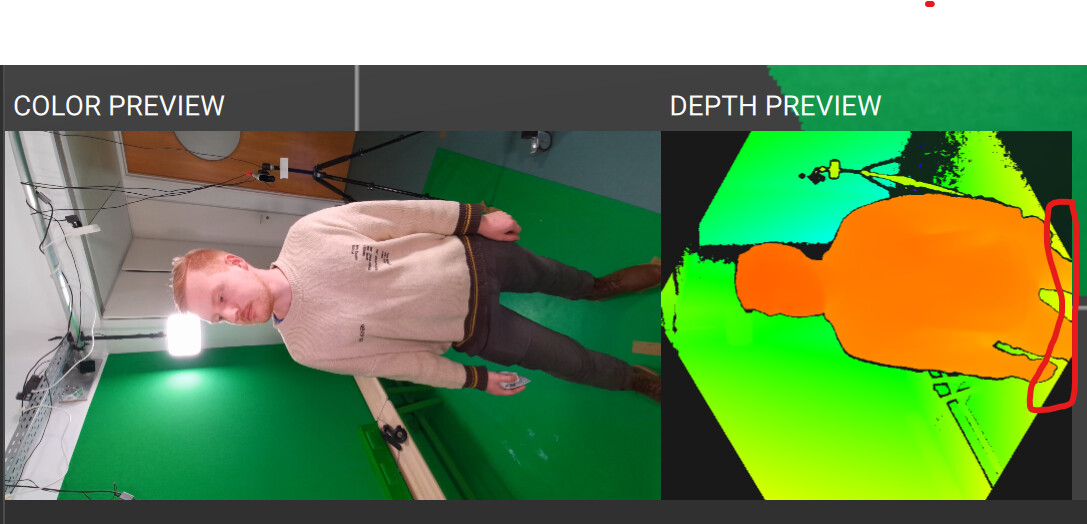
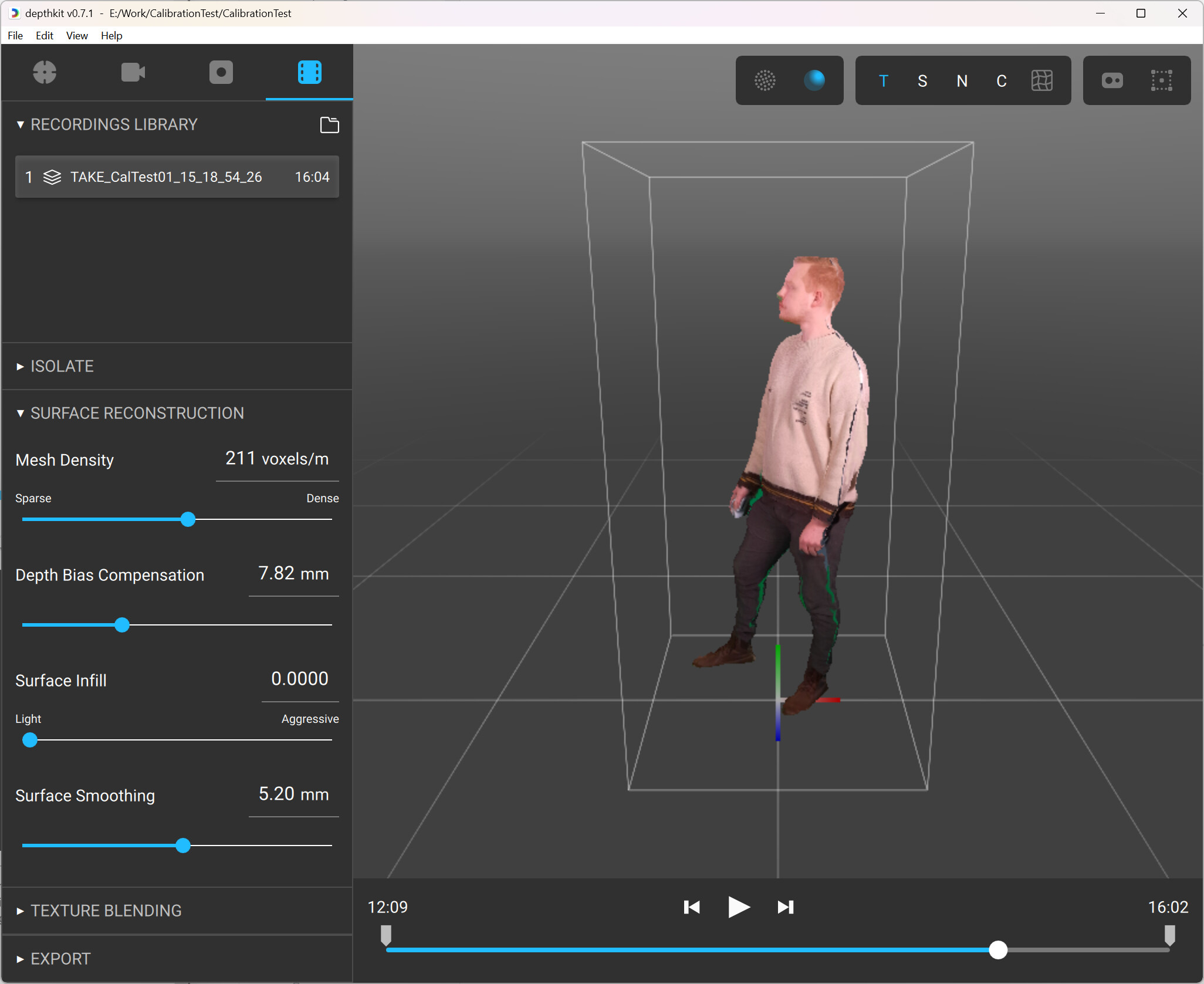
I attached a screenshot (can’t post more atm, as I’m a new forum user) of the current quality that I can achieve, aswell as the full project files. I’m looking forward to any feedback on how I could improve the calibration, sensor placement or capture quality 🙂

Project files: WeTransfer - Send Large Files & Share Photos Online - Up to 2GB Free
Thank you a lot and best regards:
Christopher