I’m using a 5 kinect azure setup which is working fine for streaming. The calibration looks reasonable, but when I export to unity, the textures and mesh look very distorted. I’m using Depthkit 0.7.1, and the Unity Expansion Package with Depthkit Core Shader Graph Look.
From Unity
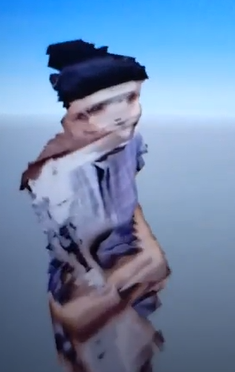
My unity project seems okay and it renders the sample footage from AutumnExport just fine. If it is my calibration file, why does it show up okay in Studio?
Any help would be appreciated!
Thanks!
~Sky
{
“_versionMajor”: 0,
“_versionMinor”: 5,
“boundsCenter”: {
“x”: 0.0,
“y”: -1.0,
“z”: 0.0
},
“boundsSize”: {
“x”: 1.0,
“y”: 2.0,
“z”: 1.0
},
“defaultReconstructionSettings”: {
“depthBiasAdjustment”: 0.0,
“edgeMaskBlurAmount”: 0.009999999776482582,
“edgeMaskSobelMultiplier”: 10.0,
“surfaceNormalColorBlendPower”: 2.0,
“viewDependentColorBlendPower”: 0.0010000000474974513
},
“format”: “perpixel”,
“numAngles”: 5,
“numColumns”: 3,
“numRows”: 2,
“perspectives”: [
{
“clipEpsilon”: 0.002180099952965975,
“crop”: {
“w”: 0.7326955795288086,
“x”: 0.13219758868217468,
“y”: 0.035388629883527756,
“z”: 0.6778416633605957
},
“depthFocalLength”: {
“x”: 961.8482055664063,
“y”: 961.5028076171875
},
“depthImageSize”: {
“x”: 2048.0,
“y”: 1536.0
},
“depthPrincipalPoint”: {
“x”: 1022.4246826171875,
“y”: 775.9476318359375
},
“extrinsics”: {
“e00”: 0.32978564500808716,
“e01”: -0.7017371654510498,
“e02”: -0.6315112113952637,
“e03”: -1.1290602684020996,
“e10”: -0.8146204948425293,
“e11”: 0.1265416145324707,
“e12”: -0.5660218000411987,
“e13”: -2.090745449066162,
“e20”: 0.47711098194122314,
“e21”: 0.7011078000068665,
“e22”: -0.5299178957939148,
“e23”: -0.7921983003616333,
“e30”: 0.0,
“e31”: 0.0,
“e32”: 0.0,
“e33”: 1.0
},
“farClip”: 2.8969361782073975,
“nearClip”: 0.6034635305404663
},
{
“clipEpsilon”: 0.0022770597133785486,
“crop”: {
“w”: 0.736912727355957,
“x”: 0.1822064220905304,
“y”: 0.26308730244636536,
“z”: 0.6660498380661011
},
“depthFocalLength”: {
“x”: 960.4542236328125,
“y”: 959.8101806640625
},
“depthImageSize”: {
“x”: 2048.0,
“y”: 1536.0
},
“depthPrincipalPoint”: {
“x”: 1014.5922241210938,
“y”: 776.8858642578125
},
“extrinsics”: {
“e00”: -0.02178417332470417,
“e01”: -0.9764485955238342,
“e02”: 0.21464768052101135,
“e03”: 0.4154072403907776,
“e10”: -0.7848621010780334,
“e11”: -0.11628890037536621,
“e12”: -0.6086611747741699,
“e13”: -2.0707054138183594,
“e20”: 0.6192874908447266,
“e21”: -0.18172800540924072,
“e22”: -0.7638441920280457,
“e23”: -1.2060859203338623,
“e30”: 0.0,
“e31”: 0.0,
“e32”: 0.0,
“e33”: 1.0
},
“farClip”: 2.7600317001342773,
“nearClip”: 0.5642176866531372
},
{
“clipEpsilon”: 0.0022342398297041655,
“crop”: {
“w”: 0.7237358689308167,
“x”: 0.1444859504699707,
“y”: 0.20954139530658722,
“z”: 0.703752875328064
},
“depthFocalLength”: {
“x”: 972.2930908203125,
“y”: 972.3392333984375
},
“depthImageSize”: {
“x”: 2048.0,
“y”: 1536.0
},
“depthPrincipalPoint”: {
“x”: 1024.6275634765625,
“y”: 777.5380249023438
},
“extrinsics”: {
“e00”: -0.4390701651573181,
“e01”: 0.610372006893158,
“e02”: 0.659290075302124,
“e03”: 1.1165591478347778,
“e10”: -0.8547919988632202,
“e11”: -0.057819705456495285,
“e12”: -0.5157397985458374,
“e13”: -1.9297479391098022,
“e20”: -0.27667316794395447,
“e21”: -0.7900018095970154,
“e22”: 0.5471280217170715,
“e23”: 0.9779639840126038,
“e30”: 0.0,
“e31”: 0.0,
“e32”: 0.0,
“e33”: 1.0
},
“farClip”: 2.869664430618286,
“nearClip”: 0.6317668557167053
},
{
“clipEpsilon”: 0.002484434051439166,
“crop”: {
“w”: 0.6172139048576355,
“x”: 0.09190216660499573,
“y”: 0.2402353733778,
“z”: 0.684151291847229
},
“depthFocalLength”: {
“x”: 969.7317504882813,
“y”: 969.3528442382813
},
“depthImageSize”: {
“x”: 2048.0,
“y”: 1536.0
},
“depthPrincipalPoint”: {
“x”: 1025.77685546875,
“y”: 779.6158447265625
},
“extrinsics”: {
“e00”: 0.04932315647602081,
“e01”: 0.9367123246192932,
“e02”: -0.3466082215309143,
“e03”: -0.4836212694644928,
“e10”: -0.9053907990455627,
“e11”: -0.10459019243717194,
“e12”: -0.41149529814720154,
“e13”: -1.946414589881897,
“e20”: -0.4217045307159424,
“e21”: 0.33411213755607605,
“e22”: 0.8429319858551025,
“e23”: 1.4360320568084717,
“e30”: 0.0,
“e31”: 0.0,
“e32”: 0.0,
“e33”: 1.0
},
“farClip”: 2.773815155029297,
“nearClip”: 0.761284351348877
},
{
“clipEpsilon”: 0.0033333436585962772,
“crop”: {
“w”: 0.9978224635124207,
“x”: 0.0,
“y”: 0.0,
“z”: 1.0
},
“depthFocalLength”: {
“x”: 971.4751586914063,
“y”: 971.258544921875
},
“depthImageSize”: {
“x”: 2048.0,
“y”: 1536.0
},
“depthPrincipalPoint”: {
“x”: 1024.15234375,
“y”: 777.4072875976563
},
“extrinsics”: {
“e00”: -0.021854449063539505,
“e01”: -0.9467461109161377,
“e02”: -0.32123851776123047,
“e03”: -0.3327024281024933,
“e10”: -0.9907816648483276,
“e11”: 0.0634777843952179,
“e12”: -0.11967542767524719,
“e13”: -1.151632308959961,
“e20”: 0.13369375467300415,
“e21”: 0.31566181778907776,
“e22”: -0.9394059777259827,
“e23”: -1.0430679321289063,
“e30”: 0.0,
“e31”: 0.0,
“e32”: 0.0,
“e33”: 1.0
},
“farClip”: 1.854885458946228,
“nearClip”: 0.3548901379108429
}
],
“textureHeight”: 2048,
“textureWidth”: 2016
}